
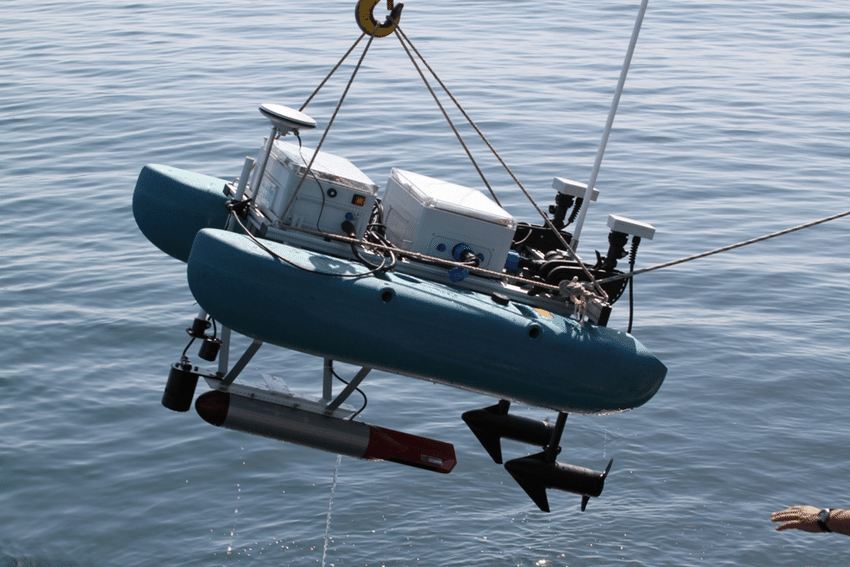
Zarco is a small size electric powered Autonomous Surface Vehicle, in operation at the University of Porto since 2005. The vehicle is based on a catamaran type floating structure
with 1.5 meters long and an overall width about 1 meter. In its original configuration it has an overall length of 1.5 m, weighting approximately 50 kg and is propelled by two independent electrical thrusters, with a maximum velocity of 4 knots. Our default choice was a configuration with differential drive provided by modified COTS trolling motors, due to a combination of price, availability and simplicity of control. These thruster are relatively inexpensive, available of the shelf from several manufacturers in a variety of power levels, and there are also many off-the-shelf solutions of electronic boards to control them from a computer. The vehicle has an additional payload capacity of more than 25 kg.
A set of easy replaceable rechargeable lead acid batteries provide energy for more than 4 hours of continuous operation. The vehicle also carries an onboard computer responsible for the execution of autonomous or remotely controlled missions and for the storage of collected payload data. The navigation system relies on data provided by a magnetic compass, an inertial measurement unit, and a L1+L2 RTK pair of GPS receivers, and is able to estimate in real time the position and attitude of the vehicle with high accuracy. A WiFi link connects the boat to a shore station, allowing for the transmission of GPS base station data and for the supervision of the vehicle autonomous operations. In order to allow for different configurations, either in terms of floatation, propulsion, on board energy, or payload sensors, the whole system was developed in a modular fashion, mainly using off-the-shelf components.
In a typical operation, the electric propulsion of Zarco accounts for about 90% of the power consumption, yielding about 4–6 h of autonomy at a nominal velocity of 2 knots. This percentage depends on many operational factors, like velocity and payload, but it is largely dominated by the hydrodynamic drag, therefore it is always a significant portion of the total power of any ASV mission. In the case of Zarco, the vehicle construction is highly modular and the energy enclosure can be swapped for a fresh pack to extend the mission duration.